Research
(*: equal contribution)
Please feel free to contact me if you are interested in any of the following works.
Journal Publications

Optimal gait design for a soft quadruped robot via multi-fidelity Bayesian optimization
Authors: Kaige Tan, Xuezhi Niu, Qinglei Ji, Lei Feng & Martin Törngren
Applied Soft Computing, 2025
[Paper] [Code] [Abstract] [BibTeX]
@article{TAN2025112568,
title = {Optimal gait design for a soft quadruped robot via multi-fidelity Bayesian optimization},
journal = {Applied Soft Computing},
volume = {169},
pages = {112568},
year = {2025},
issn = {1568-4946},
doi = {https://doi.org/10.1016/j.asoc.2024.112568},
url = {https://www.sciencedirect.com/science/article/pii/S1568494624013425},
author = {Kaige Tan and Xuezhi Niu and Qinglei Ji and Lei Feng and Martin Törngren},
}Conference Publications
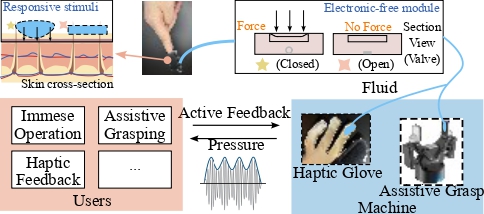
Electronic-free Pneumatic Interface for Sensorimotor Human-Robot Interaction
Authors: Jing Xu, Xuezhi Niu , Didem Gürdür Broo & Klas Hjort
Submitted to IEEE International Conference on Robotics and Automation (ICRA2026)
[Paper coming soon] [Abstract]
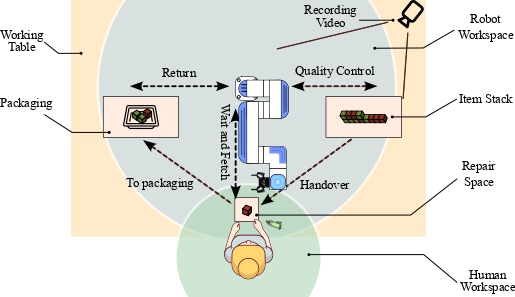
"What do I do now?": Spontaneous Human Responses to Robot Effectiveness and Efficiency Malfunctions in Collaborative Robotics
Authors: Alexandros Rouchitsas, Xuezhi Niu , Ginevra Castellano & Didem Gürdür Broo
Accepted to The ACM Conference on Human Factors in Computing Systems (CHI2026)
[Paper coming soon] [Abstract]

Investigating Symbiosis in Robotic Ecosystems: A Case Study for Multi-Robot Reinforcement Learning Reward Shaping
Authors: Xuezhi Niu & Didem Gürdür Broo
2025 9th International Conference on Robotics and Automation Sciences (ICRAS)
[Paper] [Code] [Abstract] [BibTeX]
@INPROCEEDINGS{11108729,
author={Niu, Xuezhi and Broo, Didem Gürdür},
booktitle={2025 9th International Conference on Robotics and Automation Sciences (ICRAS)},
title={Investigating Symbiosis in Robotic Ecosystems: A Case Study for Multi-Robot Reinforcement Learning Reward Shaping},
year={2025},
pages={112-117},
doi={10.1109/ICRAS65818.2025.11108729}
}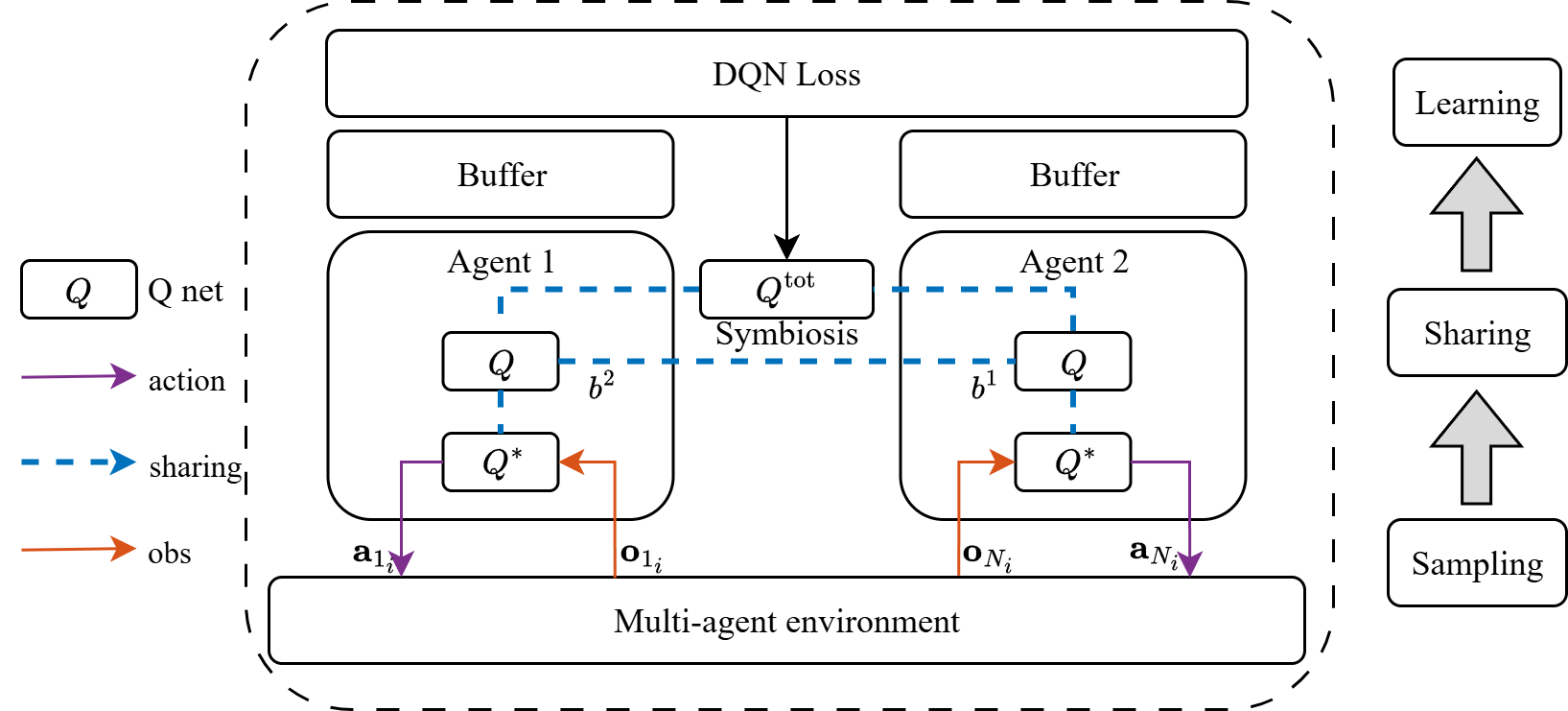
Enabling Symbiosis in Multi-Robot Systems through Multi-Agent Reinforcement Learning
Authors: Xuezhi Niu, Natalia Calvo Barajas & Didem Gürdür Broo
2025 IEEE 8th International Conference on Industrial Cyber-Physical Systems (ICPS)
@INPROCEEDINGS{niu2025enabling,
author={Niu, Xuezhi and Barajas, Natalia Calvo and Broo, Didem Gürdür},
booktitle={2025 IEEE 8th International Conference on Industrial Cyber-Physical Systems (ICPS)},
title={Enabling Symbiosis in Multi-Robot Systems Through Multi-Agent Reinforcement Learning},
year={2025},
pages={1-7},
doi={10.1109/ICPS65515.2025.11087893}
}
Optimal Gait Control for a Tendon-driven Soft Quadruped Robot by Model-based Reinforcement Learning
Authors: Xuezhi Niu*, Kaige Tan*, Didem Gürdür Broo & Lei Feng
2025 IEEE International Conference on Robotics and Automation (ICRA)
[PDF] [Code] [Abstract] [BibTeX]
@inproceedings{niu2025optimal,
title = {Optimal Gait Control for a Tendon-driven Soft Quadruped Robot by Model-based Reinforcement Learning},
author = {Niu, Xuezhi and Tan, Kaige and G{\"u}rd{\"u}r Broo, Didem and Feng, Lei},
booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)},
year = {2025},
pages = {9287-9293},
doi = {10.1109/ICRA55743.2025.11128611},
url = {https://doi.org/10.1109/ICRA55743.2025.11128611}
}Thesis
- Optimal Gait Control of Soft Quadruped Robot by Model-based Reinforcement Learning
Xuezhi Niu
M.Sc. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2023
Technical Report
- Electronically Vacuum Regulated Shut-off Valve for Milking System
Carl Egenäs*, Felix Ekman*, Chenqi Ma*, Tim Naser*, Xuezhi Niu*, Axel Sernelin*, Samuel Stenow*, Benjamin StrÖm*
H.K. Project, KTH Royal Institute of Technology, Stockholm, Sweden, 2023
Reviewer
IEEE International Conference on Robotics and Automation (ICRA), IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), IEEE-RAS International Conference on Humanoid Robots (Humanoids), IEEE International Conference on Robot and Human Interactive Communication (ROMAN).